Research Projects
Selected works demonstrating expertise in optimal control, formal safety verification, and multi-agent coordination deployed on physical hardware.
- All
- Ongoing
- Published
- Control
- Learning
- Perception
{kind=link}
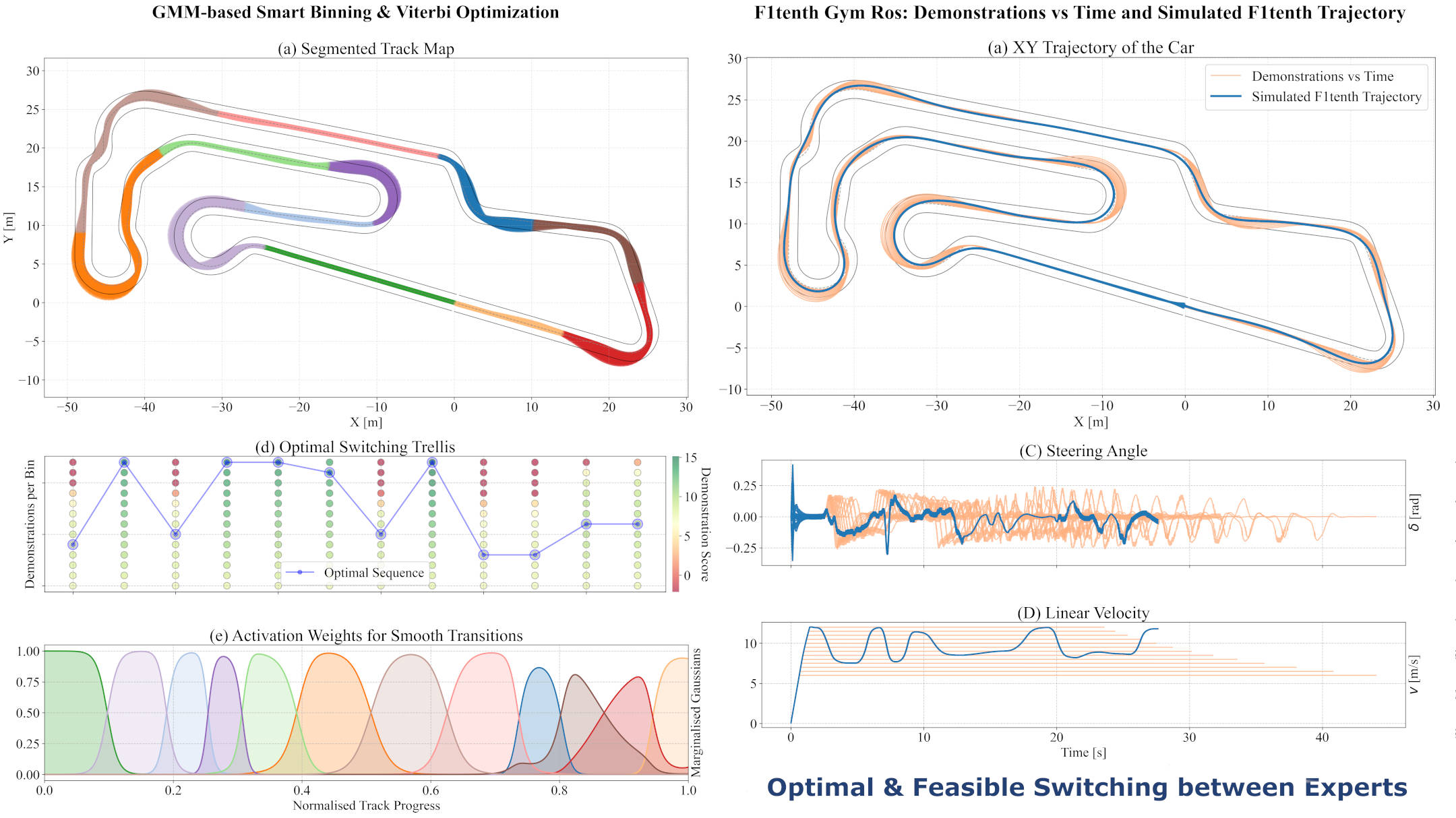
Optimal Trajectory Synthesis via Multi-Expert Switching
- Developed a hierarchical control stack using Gaussian Mixture Models (GMM) to discretize track topology into adaptive velocity regimes.
- Implemented a Dynamic Programming solver for optimal expert switching, ensuring kinematic feasibility and jerk minimization.
- Deployed on NVIDIA Jetson for high-speed racing at Roboracer 2025 (IIT Bombay) as part of M.Tech thesis.
{kind=link}
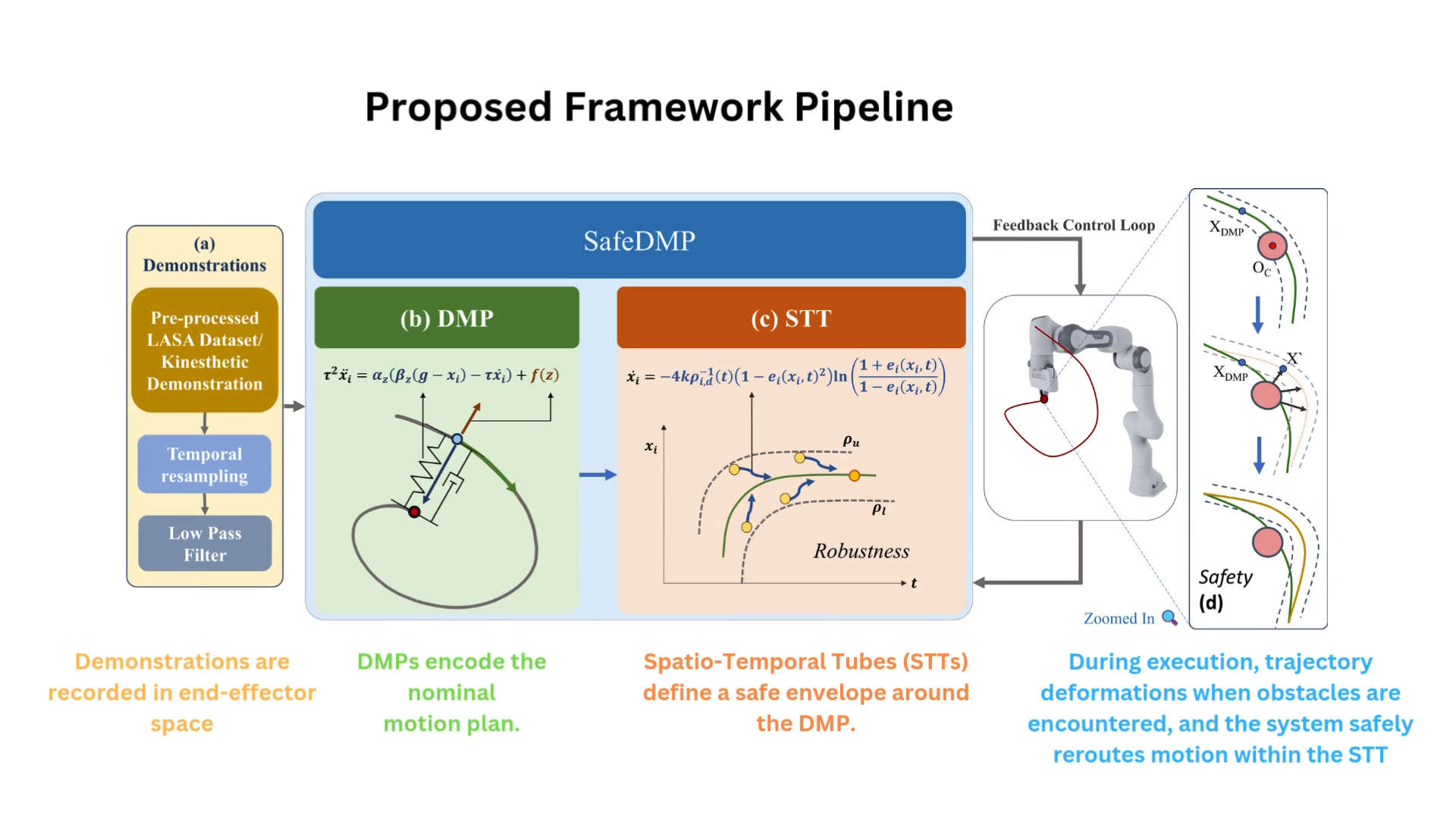
SafeDMPs: Integrating Formal Safety with DMPs for Adaptive HRI
- Synthesized a modular safety framework merging Dynamic Movement Primitives with Spatio-Temporal Tubes.
- Derived closed-form safety feedback laws that outperform CBF-QP baselines (99.97% faster compute, 48% lower memory).
- Validated on Franka Emika Research 3 hardware for adaptive Human-Robot Interaction.
Robot Conga: A Leader-Follower Walking Approach to Sequential Path Following in Multi-Agent Systems
- Engineered a leader-follower formation controller using spatial displacement logic for precise inter-agent spacing.
- Enabled dynamic path replanning without destabilizing follower trajectories in localized control environments.
- Validated on TurtleBot3 (wheeled) and Laikago (quadruped) platforms via simulation.
{kind=link}
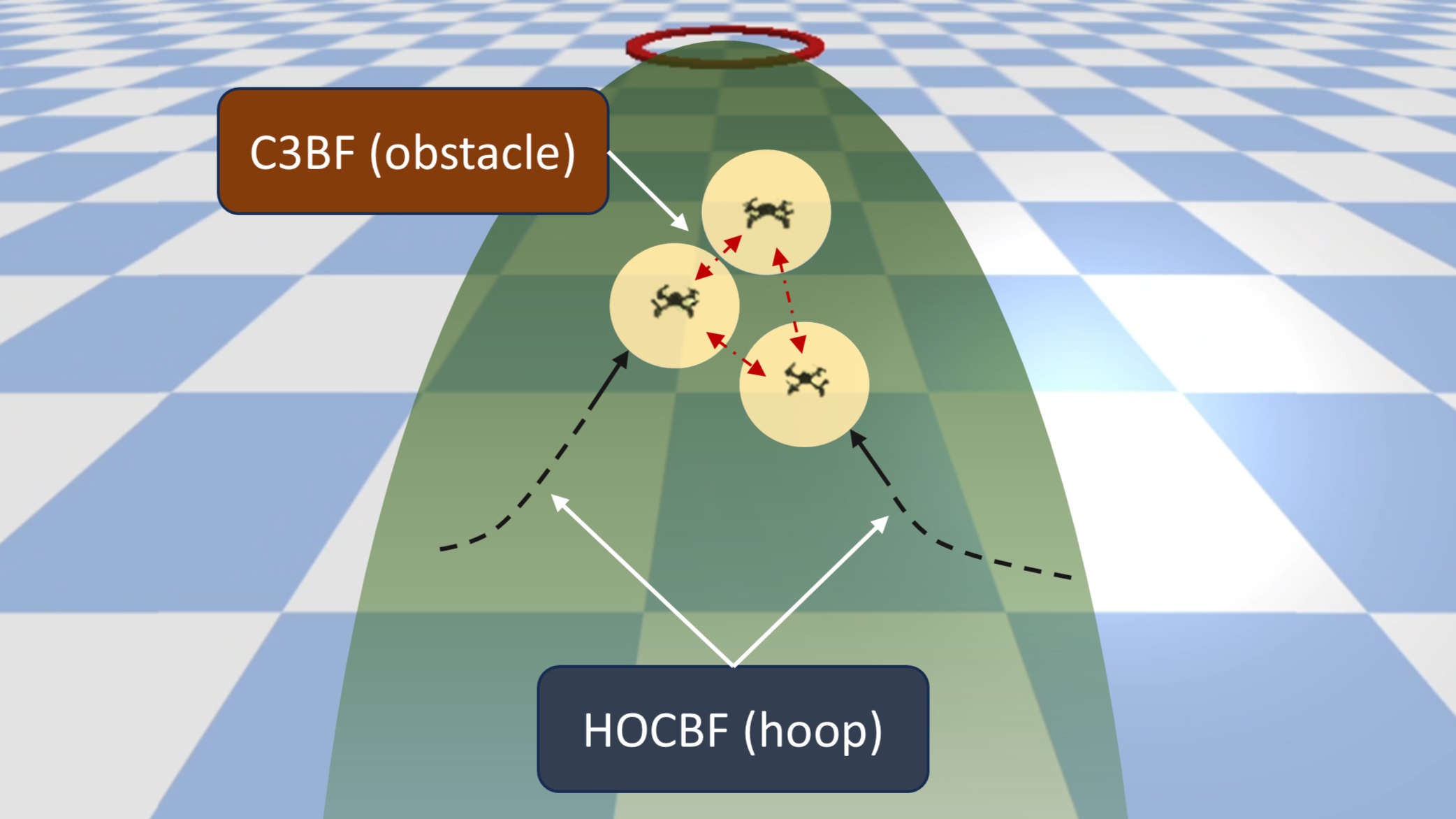
Swarm Pass: Safe Swarm Traversal via C3BF
- Designed a hierarchical collision avoidance framework for quadrotor swarms using Collision-Cone (C3BF).
- Integrated High-Order Control Barrier Functions (HOCBF) to ensure safety through tight spatial bottlenecks.
- Validated real-time QP safety filters in PyBullet and Crazyflie 2.1 simulation environment.
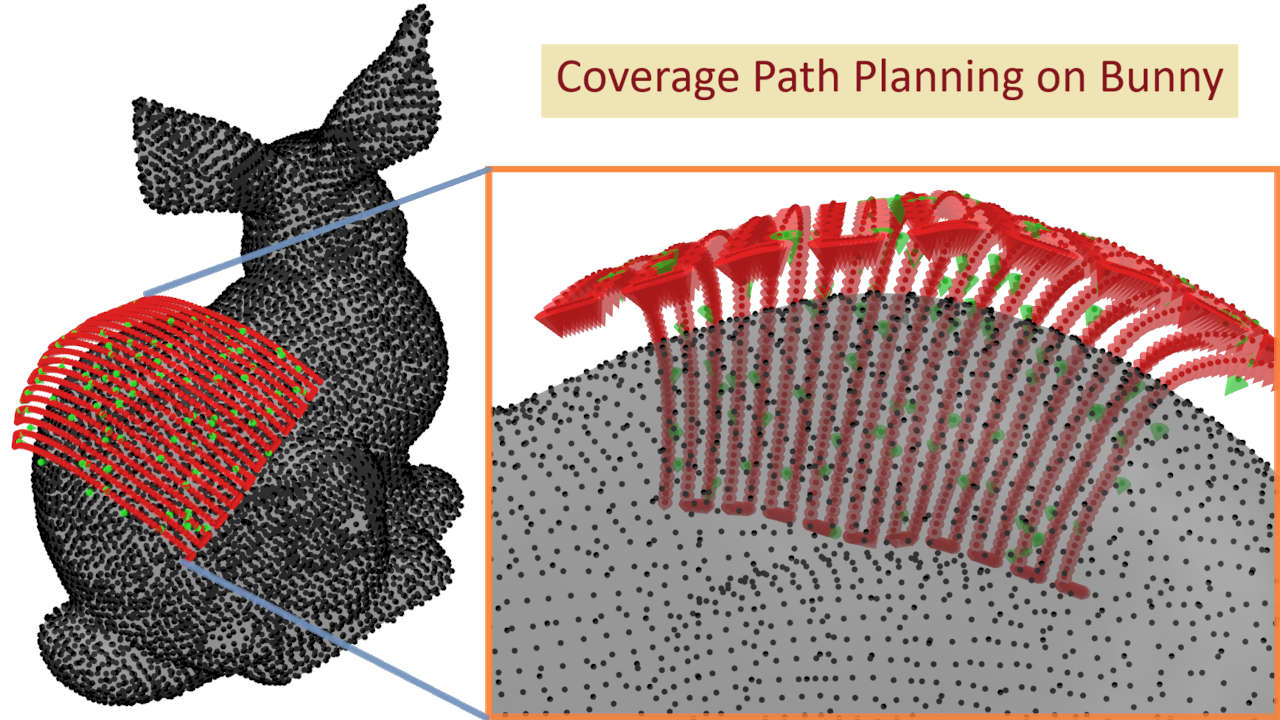
Optimized CPP for Complex Geometries
- Architected Coverage Path Planning algorithms for non-planar aircraft surfaces using Gaussian parametrization.
- Utilized cylindrical coordinate transformations to enable structured traversal of complex curved geometries.
- Integrated automated cavity detection pipelines to ensure collision-free toolpath generation for industrial tasks.
Smooth Goal-Reaching for Manipulators
- Fine-tuned Reinforcement Learning agents (PPO) in NVIDIA Isaac Lab for precision goal-reaching tasks.
- Engineered dense reward functions to minimize joint jerk, achieving smooth trajectories for industrial manipulators.
- Executed successful Sim-to-Real transfer on physical UR10 cobots, bridging the simulation gap.
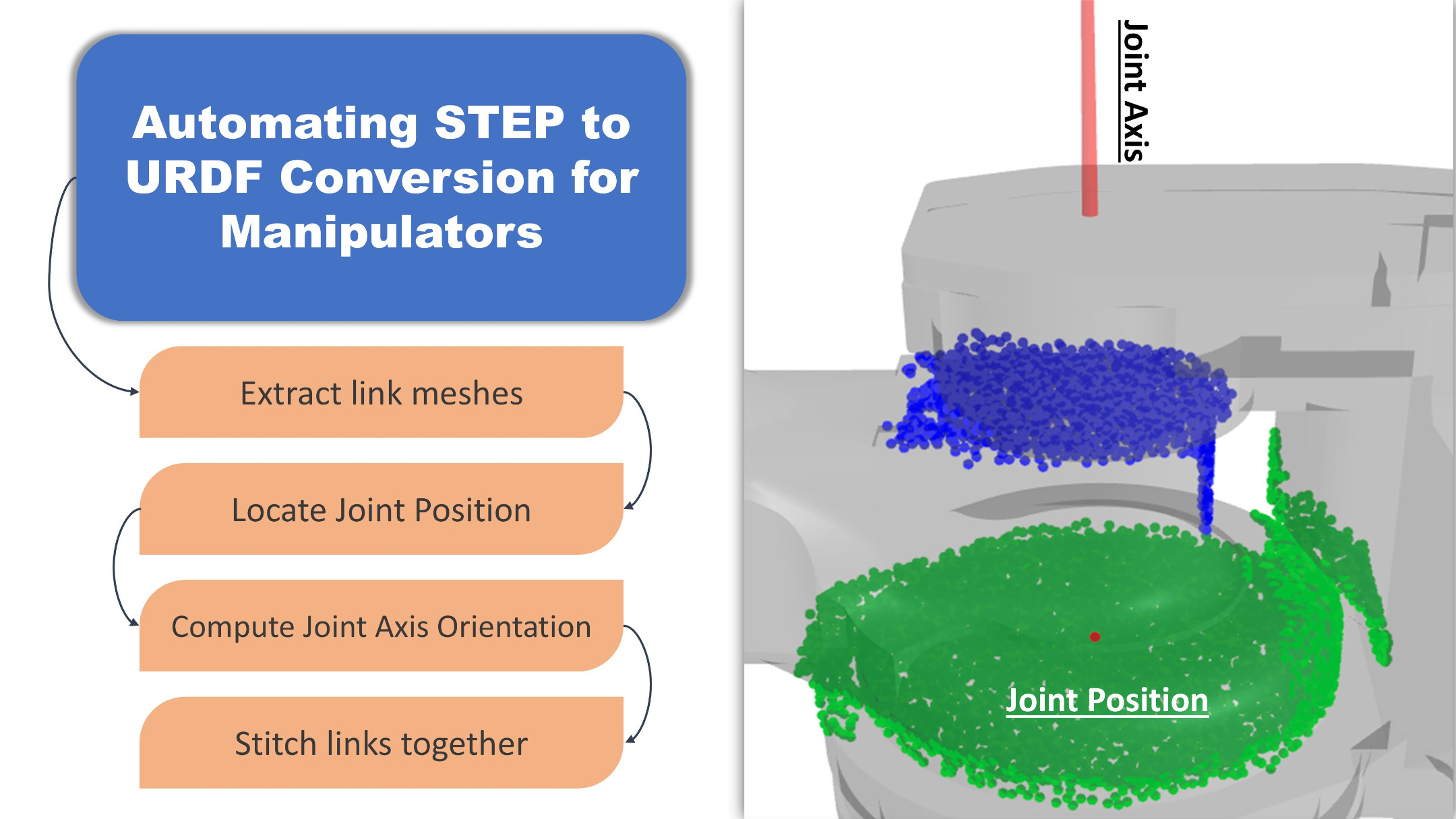
Geometry-Driven Robot Model Synthesis
- Built an automated pipeline to convert raw STL meshes into kinematic URDF models using nearest-neighbor analysis.
- Applied Principal Component Analysis (PCA) and DBSCAN to infer joint axes, origins, and linkage hierarchies.
- Streamlined the simulation integration workflow by reducing manual rigging effort for custom end-effectors.
Metric-Semantic 3D Reconstruction
- Metric-semantic SLAM using Kimera-VIO-Semantics and Intel RealSense D455 for dense indoor 3D mapping
- Transformer-based semantic fusion using SegFormer for scene segmentation and object-aware 3D reconstruction
- Evaluated trajectory accuracy via ATE, validating robust loop closure in large-scale corridors
Experiments on Intersection Management
- Deployed an RL-based scheduler for non-signalized intersection management on a fleet of Pololu robots.
- Designed a low-latency communication protocol over XBee modules to synchronize crossing orders under noise.
- Optimized hardware-level control loops to match simulation results in physical experiments.
Chromotion: GA-PID Navigator
- Implemented a Genetic Algorithm to optimize high-dimensional PID controllers for autonomous navigation using 2D ray-casting.
- Built a multi-processed Pygame simulator that evaluates population fitness in parallel across CPU cores.
- Designed a modern dashboard for real-time obstacle creation, weight management, and fitness heatmap visualization.
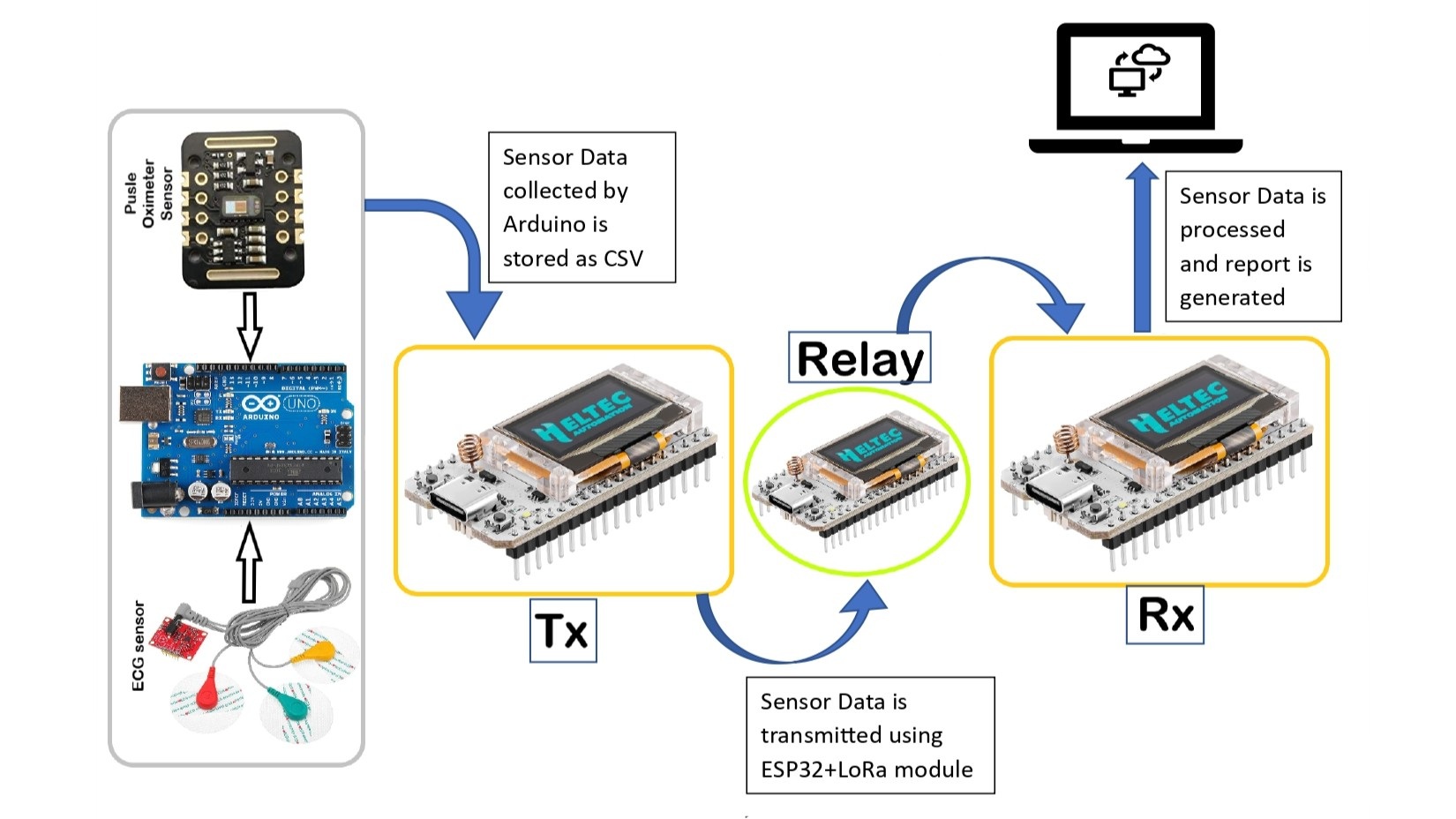
Multihop LoRa Healthcare Network
- Engineered a low-power, multi-hop LoRa mesh network for long-range telemetry in resource-constrained environments.
- Developed an end-to-end pipeline for acquisition, compression, and transmission of physiological data (ECG, SpO₂).
- Implemented robust packet forwarding algorithms on ESP32/Arduino nodes to ensure reliability in lossy channels.
Collaborators & More...
Brilliant minds and talented peers I have had the privilege to work with.
Archana Kulkarni
MTech RAS, RBCCPS, IISc
Had fun working together on F1Tenth hardware implementation, Kimera-VIO-Semantics and Swarm Pass.

Pranav Tiwari
MTech RAS, RBCCPS, IISc
Had fun working together on SafeDMP and Robot Conga.
Ganga Nair B.
MTech RAS, RBCCPS, IISc
Had fun working together on Swarm Pass and Robot Conga.

Arghyadeep Barat
BE ETCE, JU
Had fun working together on Chromotion.

Chhandak Mallick
BE ETCE, JU
Had fun working together on Multihop & LoRA.
